Un team guidato dal professor Fu Chenglong della Southern University of Science and Technology (SUSTech) ha presentato un nuovo sistema indossabile progettato per aiutare a trasportare carichi pesanti. Chiamato "robot centauro" o "metà uomo, metà robot", lo sviluppo è stato pubblicato sull'autorevole International Journal of Robotics Research. Il dispositivo mira a ridurre lo sforzo umano durante lunghe camminate con peso, rendendolo adatto per usi militari, operazioni di soccorso e compiti quotidiani.
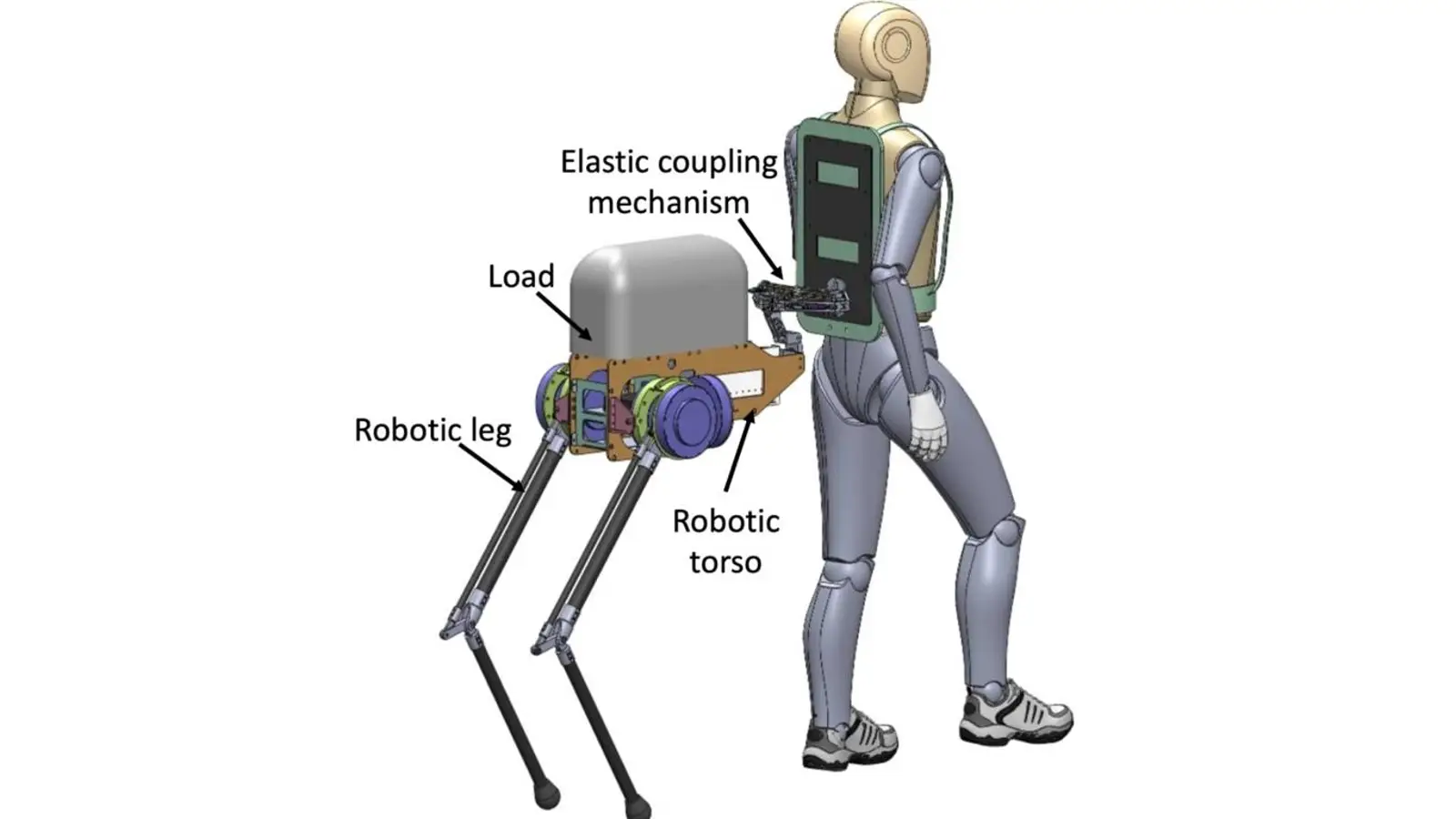
A differenza degli esoscheletri tradizionali, che operano parallelamente alle gambe umane e offrono risparmi energetici relativamente modesti—circa il 10% rispetto a uno zaino normale—questo sistema segue un approccio diverso. Il robot non è rigidamente attaccato alle gambe, ma funziona come un "secondo paio di arti" separato, collegato all'utente attraverso un'interfaccia elastica speciale sulla schiena. Questa configurazione crea un sistema ibrido a quattro zampe, in cui l'essere umano gestisce la navigazione e le decisioni, mentre il robot si occupa del carico e fornisce trazione orizzontale.
Un'innovazione chiave è l'accoppiamento elastico con rigidità non lineare sviluppato dal team. Sotto carichi leggeri, rimane rigido e reattivo, ma con carichi più pesanti diventa più cedevole e assorbe la forza. Ciò permette una separazione dinamica tra bilanciamento e assistenza alla potenza, consentendo al robot di muoversi stabilmente come sistema indipendente mentre aiuta in modo preciso l'essere umano.
I test hanno mostrato risultati impressionanti: trasportando 20 kg (circa il 29% del peso corporeo), l'uso del "centauro" ha ridotto i costi metabolici netti del 35% e la pressione plantare del 52%. Anche la variabilità della larghezza del passo è diminuita, e la stabilità nella camminata si è rivelata paragonabile a quella senza carico. Questo sviluppo evidenzia come combinare la ridistribuzione verticale del peso con la trazione orizzontale possa migliorare significativamente l'efficienza e la sicurezza nel trasporto di carichi pesanti.