南方科技大学の傅晨龍教授率いる研究チームが、重い荷物を運ぶ際の負担を軽減する新しいウェアラブルシステムを発表した。「ハーフヒューマン、ハーフロボット」または「セントールロボット」と呼ばれるこの開発は、国際的なロボット研究誌に掲載された。このデバイスは、重い荷物を背負って長時間歩く際の人間の負担を減らすことを目的としており、軍事、救助活動、日常業務に適している。
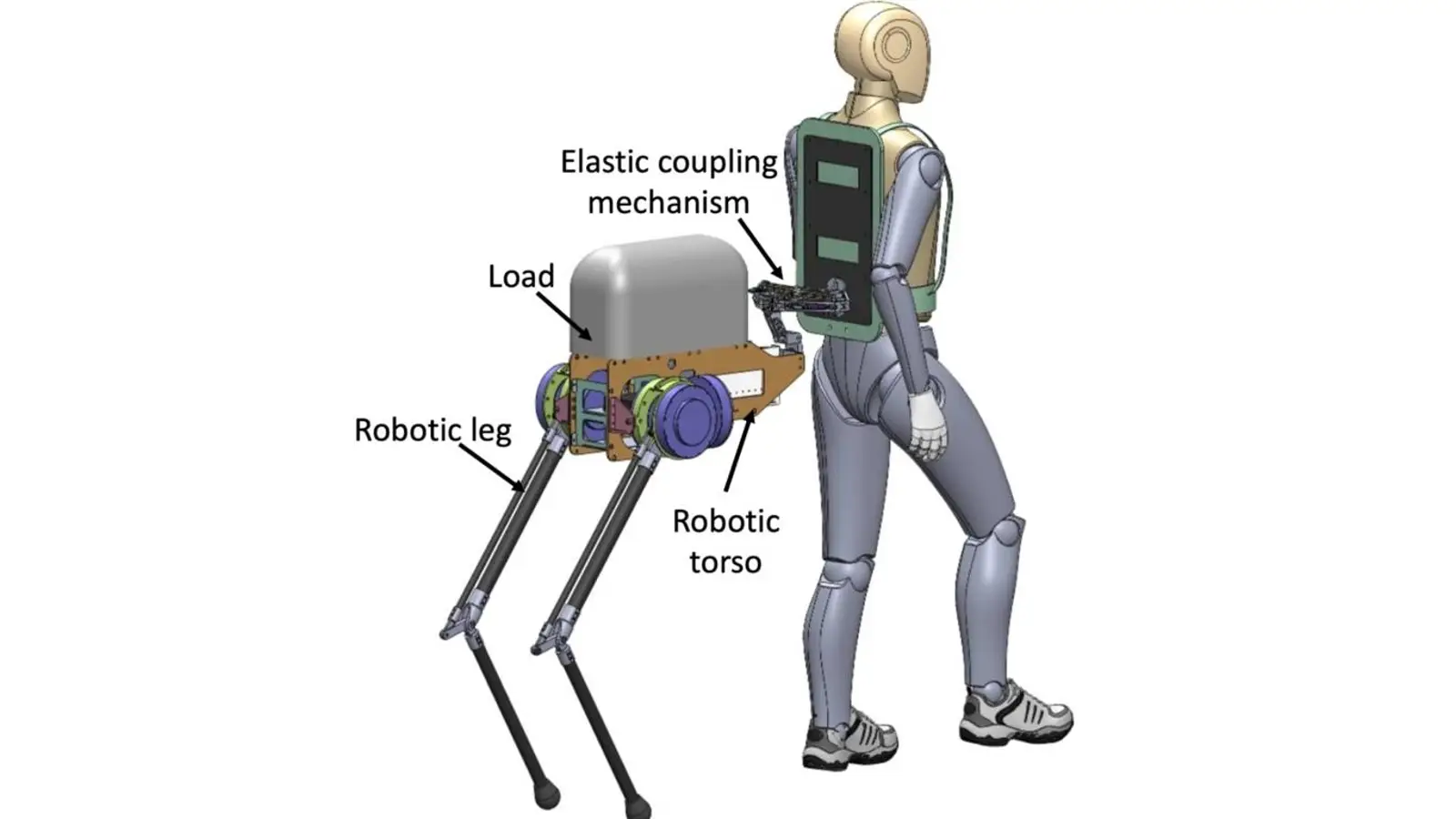
従来の外骨格は人間の脚と並行して動作し、通常のリュックと比べて約10%という比較的控えめなエネルギー節約しか提供しないが、このシステムは異なるアプローチを取る。ロボットは脚に固定されず、背中の特殊な弾性インターフェースを通じてユーザーに接続された別個の「一対の四肢」として機能する。この構成により、ハイブリッドな四足システムが生まれ、人間がナビゲーションと意思決定を担当し、ロボットが重量負担と水平方向の牽引力を担う。
重要な革新は、研究チームが開発した非線形剛性を持つ弾性結合である。軽い荷重時には硬く反応性が高いが、重い荷重時にはより柔軟になり、力を吸収する。これにより、バランスとパワーアシストの間の動的な分離が可能となり、ロボットは独立したシステムとして安定して動きながら、人間を正確に支援できる。
テストでは印象的な結果が示された:20kg(体重の約29%)を運ぶ際に、「セントール」を使用すると、正味の代謝コストが35%減少し、足圧が52%減少した。歩幅の変動も減少し、歩行安定性は荷物なしで移動する場合と同等であることが証明された。この開発は、垂直方向の重量再分配と水平方向の牽引力を組み合わせることで、重い荷物の輸送における効率と安全性を大幅に向上させられることを強調している。